Schüler der 4CM entwickelten Projekt „DeltaRobot“
Die Aufgabenstellung des Projekts bestand darin, einen Roboter mit allen Steuerungsmöglichkeiten zu entwickeln und alle dazugehörenden Einzelteile entsprechend zu konstruieren.
Der Delta-Roboter wurde im Rahmen des KOP-Unterrichts im Schichtbetrieb/ Distancelearning konzipiert und konstruiert. Für die erfolgreiche Abwicklung und Durchführung eines derartig komplexen Projektes mit mehreren Projektmitarbeitern gehört ebenso ein gut dokumentiertes Projektmanagement dazu.
Der Roboter besteht aus drei NEMA-17-Schrittmotoren, die mithilfe von drei DRV8825 Schrittmotortreibern und einem Arduino Nano angesteuert werden. Der Roboter wird mit drei Endschaltern referenziert. Die mechanischen Komponenten, die in Fusion360 konstruiert wurden, bestehen aus 3D-gedrucktem PLA-Kunststoff.
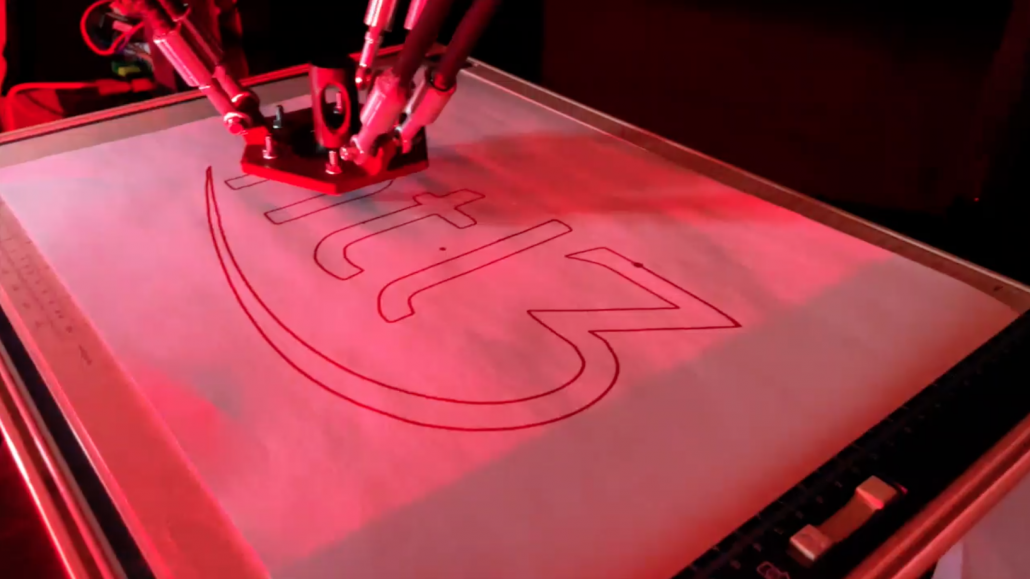
Als zusätzliches Projektziel wurde angesetzt, dass der Delta-Roboter das Schullogo mit inverser Kinematik zeichnen kann. Wie schnell bemerkt wurde, war dieses Ziel zu hoch angesetzt. Allerdings wurde stattdessen eine Alternativlösung gefunden. Der Roboter wurde virtuell in Creo aufgebaut und entlang eines Pfades, welcher das HTL-Logo darstellt, bewegt. So konnten die Winkel aller Arme in Form einer Excel-Tabelle ausgelesen und dem Roboter zugesandt werden.
Projektleiter: Daniel Lueger
Projektleiter Stellvertreter: Homola Stefan
Mitarbeiter: Theo Reynaud
Klasse: 4CM 2020/2021

